PicoRubyを理解する1

PicoRuby
A Ruby interpreter implementation for one-chip microcontrollers - PicoRuby
ちゃんと中身を理解できてなかったので、コードや資料を読んで理解したい。
特にパーサーやVMの周りをどうやって小さくできているのか。
まずは基礎知識から。
公式情報
PicoRuby Documentation
API documentation
羽角さんの資料
2025
MicroRuby: True Microcontroller Ruby
RubyKaigi 2025, #rubykaigi

RubyKaigi 2025 で発表したMicroRubyとはなんだったのか
MicroRuby: True Microcontroller Ruby というタイトルの発表をしました。
MicroRubyとは?
Ruby会議には参加できてないので、詳細はブログの記事からの理解ですが、以下のような、図のような感じなのかと理解しました。コンパイラをカスタムして準備してしまうのが驚くべきところ。パーサーもPrismに置き換わっているらしい。
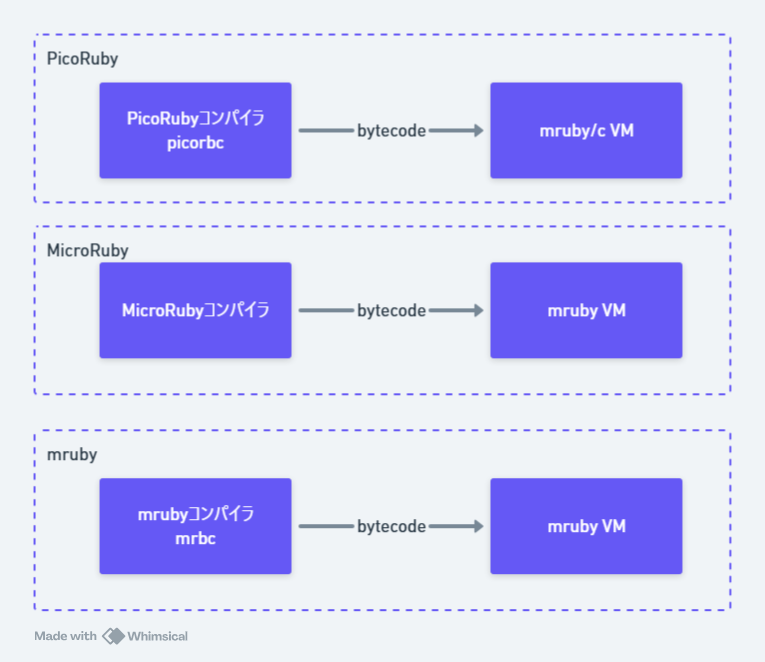
で、コンパイラの周りやmrbgemの扱いなどは、やはりコードを追っていかないといけない。
2024
Unlock The Universal Parsers: A New PicoRuby Compiler
RubyKaigi 2024, #rubykaigi

令和の隙間産業——PicoRubyはどこから来てどこへ行くのか - HASUMI Hitoshi - Rabbit Slide Show
Presentation slide for 大阪Ruby会議04
Ruby Prize 2021 最終ノミネート者 羽角 均 インタビューRubyPrize
Rubyコミュニティの「個人賞」

Matz:「そっか、256KBあったらmryubyのVMだけなら動くのか。」
ESP32でPSRAM 8M乗ってるとmrubyのパーサ/コンパイラも込みで動かせた実績あるので、Raspi PicoでもPSRAM搭載ボードなら行けるはず。
羽角さん「僕としては、PicoRubyとかmrubyのエコシステムを広げていくのに、PicoRubyコンパイラを作っただけじゃ面白くなくて、使われないと楽しくないわけですよね。」
とても共感。C書けるなら、Cで書いてしまっても良いのだけど、せっかく環境を作るからには他の人に使ってほしい。羽角さんは一人でエコシステムまで作ろうとしててほんとすごい。
n月刊ラムダノート Vol.4, No.1(2024)
計算機好きのための技術解説情報誌 エヌゲッカンラムダノート(不定期刊行)106ページ A5判 紙書籍は1色刷 2024年2月6日 第4巻第1号/通巻7号 発行 目次 #1 手を動かして学ぶストリーム処理入門(中谷翔)#2 WebAssemblyの制約を越える(齋藤優太) #3 PicoRubyといっしょに学ぶ、プログラミング言語が電気回路を動かす仕組み(羽角均)
買って読んでみた。
基本的なところからとても丁寧に書いてあるので、PicoRubyちゃんと使いこなしたい方は必読と思いました。
その他
mruby/c and data-flow programming for small devices
RubyKaigi 2025, #rubykaigi

https://www.slideshare.net/slideshow/mruby-c-and-data-flow-programming-for-small-devices/278614229
mruby/cについて、田中先生のスライドが公開されていた。
Node-REDから使えるようにした、というお話。
次のステップ
PicoRubyのコードを読む。