PicoRubyベースのミニコンピュータ

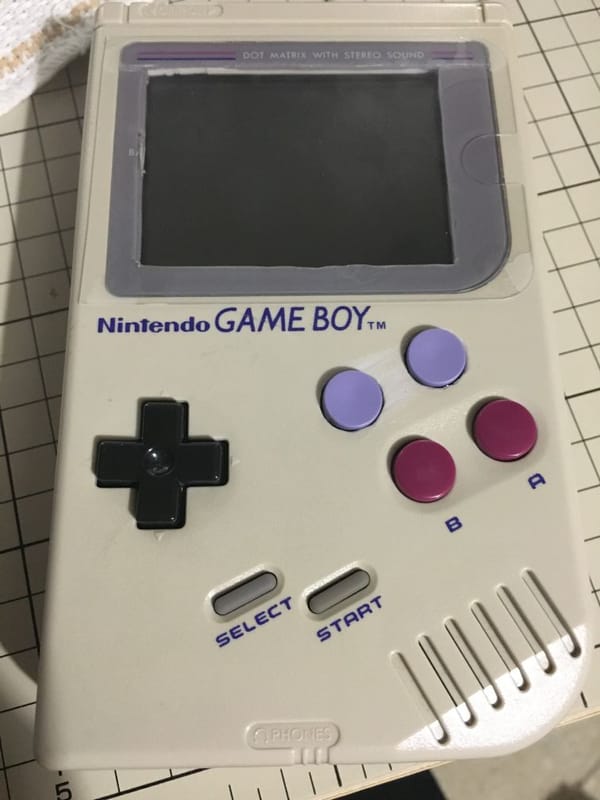
先日、SNSを見ていたらPicoCalcというデバイスを見つけた
PicoCalc | ClockworkPi
ClockworkPi - Creators of PicoCalc uConsole DevTerm and GameShell, Open Source Portable Hardware for Every Dev.
これはclockworkから出ているRaspberryPi Picoをコアとして、キーボードとモニタを搭載したスタンドアロンなポケットコンピュータキットです。
clockworkはRaspberryPiベースのロマンあふれるデバイスをこれまで提供している会社で、私も昔クラウドファンディングに参加したこともありました。
私自身も、以前、ラズパイをタカチケースに入れて気合でポケコンもどきを作ったりしたこともあったので、この洗練された筐体には当然心が躍りました。

デフォルトで動くのはBasicで、これもまた味わいがあってよきですが、やはり自分としてはmruby動かしたい、ということで、Raspi PicoといえばPicoRubyの出番です。特にR2P2がこの画面とキーボードで動くと熱い。
GitHub - picoruby/R2P2: PicoRuby shell for Raspberry Pi Pico (RP2040)
PicoRuby shell for Raspberry Pi Pico (RP2040). Contribute to picoruby/R2P2 development by creating an account on GitHub.

そんな風に思って、とりあえず注文したのですが、結構発送に時間かかりそうです。
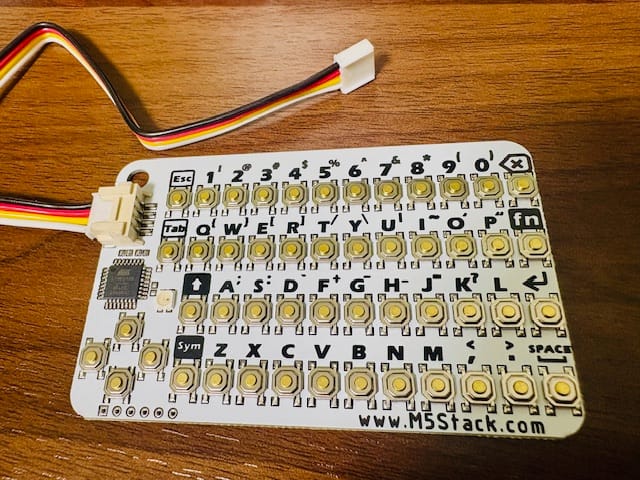
もし間に合えば、7月のPicoRuby Overflow会議に持っていきたいなと思っています。ちょっと実機で動かせる状態にするのは間に合わないかも、と思って試作用にI2Cキーボードの例を準備したりしてました。SPIのモニタは確か部品箱に何か眠っていたはず…
実現方法としては、RaspberryPi PicoのSDKによれば、stdioのドライバは任意のものが追加可能らしいので、そこを差し替えればよいはず。一度基本的なものが作れれば、あとはPicoCalc環境に移植するのも難しくはないはずです。
PicoCalcには、PSRAMやスピーカーとかも載っているので、専用のmrbgem開発するとより楽しく遊べそうです。